Prediction of pedestrian dynamics in complex architectures with artificial neural networks
Pedestrian behavior tends to depend on the type of facility. The flow at bottlenecks, for instance, can exceed the maximal rates observed in straight corridors. Consequently, accurate predictions of pedestrians' movements in complex buildings including corridors, corners, bottlenecks or intersections are difficult tasks for minimal models with a single setting of the parameters (so-called physics-based models).
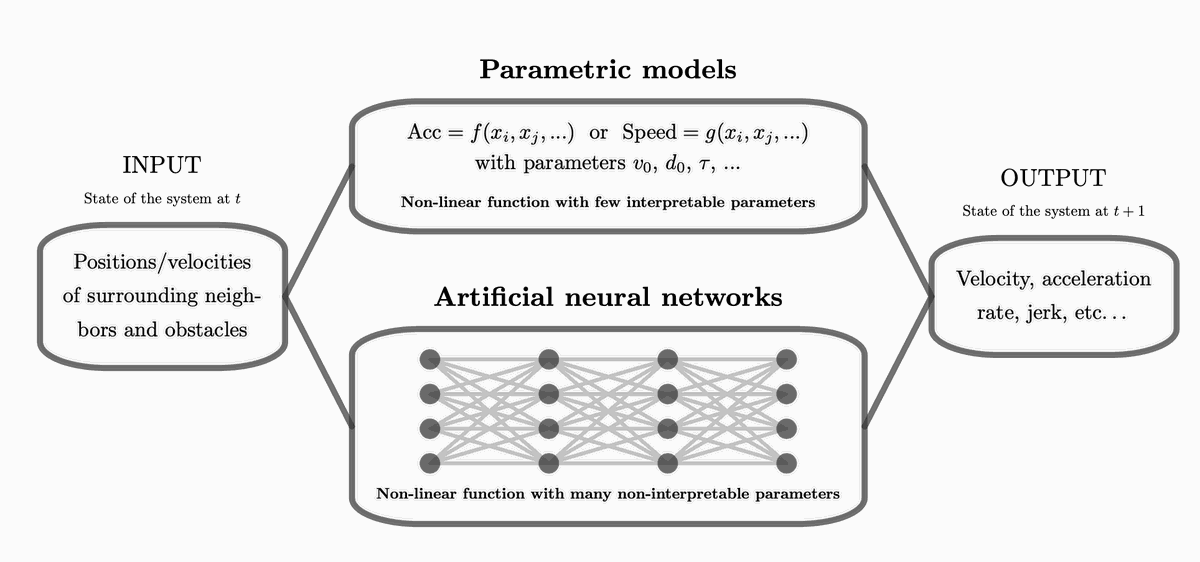
Artificial neural networks are robust algorithms able to identify various types of patterns. In this paper we verify their suitability for forecasting of pedestrian dynamics in complex architectures. Therefore, we developed, trained and tested several artificial neural networks for predictions of pedestrian speeds in corridor and bottleneck experiments. The estimations are compared to those of a classical speed-based model.
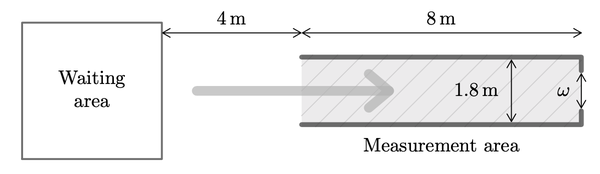
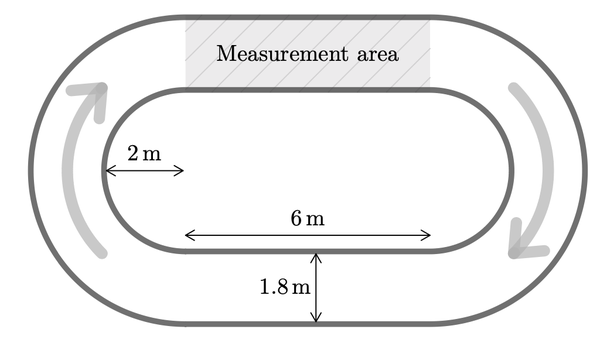
Two data sets of pedestrian trajectories obtained from experiments in laboratory conditions were used to train and test the speed model and the artificial neural networks and for comparison with the predictions. One experiment was realized in a corridor geometry while the other was carried out in a bottleneck.
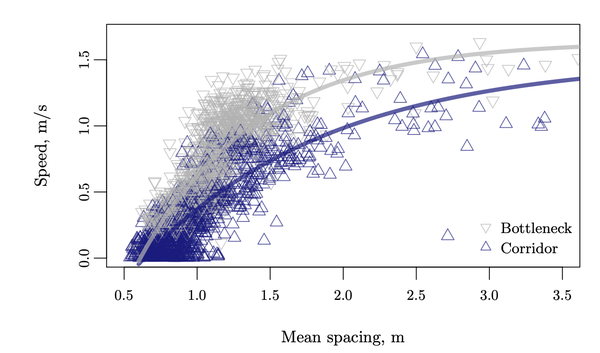
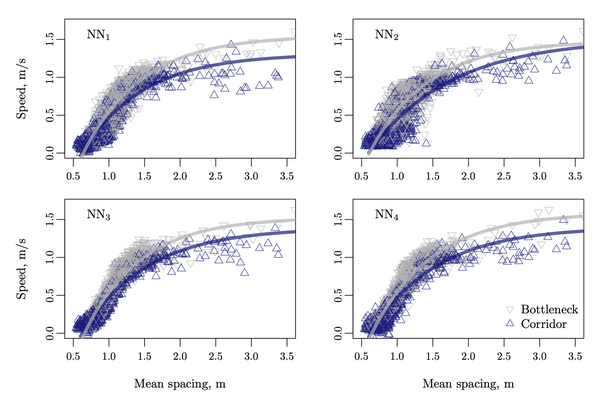
The two data sets for the corridor and the bottleneck experiments describe two slightly different interaction behaviors. The speed for a given mean spacing tends to be higher in the bottleneck than in the corridor when the system is congested. This suggests that pedestrians accept to walk temporally at the same mean spacing faster and closer in a bottleneck than in a corridor.
Some examples of predictions obtained with the developed neural networks for the heterogeneous scenario C+B/C+B (combining both corridor and bottleneck experiments) are presented below. The increase of the performances observed in the bottleneck experiment for the real data is, even partially, predicted. Indeed, the neural networks seem to identify the two experiments and their specific patterns.
We have shown that the neural networks can distinguish the two facilities and significantly improve the prediction of pedestrian speeds. The results are first steps suggesting that neural networks could be suitable and robust algorithms for the prediction of pedestrian dynamics in complex architectures including different types of facilities. Data collection, methods for training and setting of the network complexity have to be developed and experimentally tested. The simulation of the networks remains to be carried out over full trajectories and compared to the performances obtained with other existing microscopic models, and notably anisotropic models and multi-agent systems.