Wayfinding
A fundamental step in the simulations of pedestrians' movement is the wayfinding (or routing) in a built environment. Not only the distance to an exit is decisive for the choice of a path but also the minimization of waiting times when queues are forming.
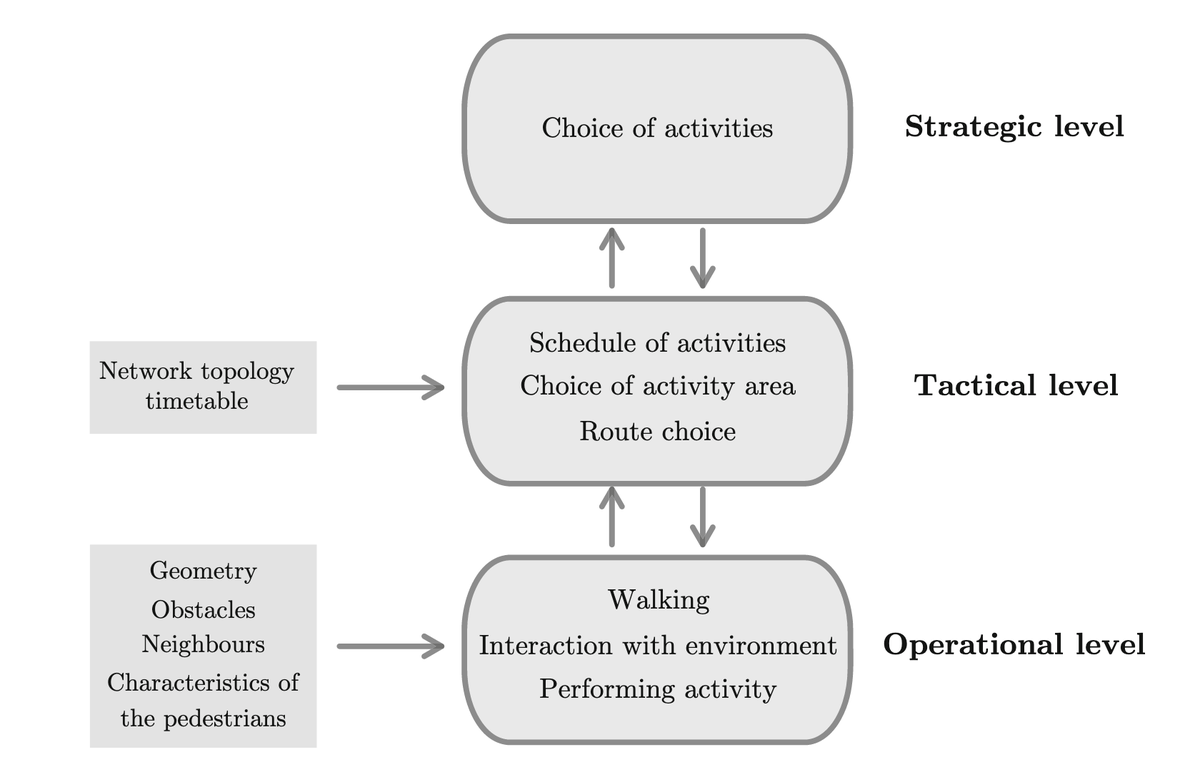
Often modeling of route choice of pedestrians in buildings and open spaces as a component of the "tactical level" can be seen as the composition of two aspects: the global pathfinding through a geometry and the avoidance of static or dynamic obstacles (like walls or other agents) in a local situation.
Various approaches have been developed. In the following, a short introduction to the main models developed so far in JuPedSim is given.
Shortest path
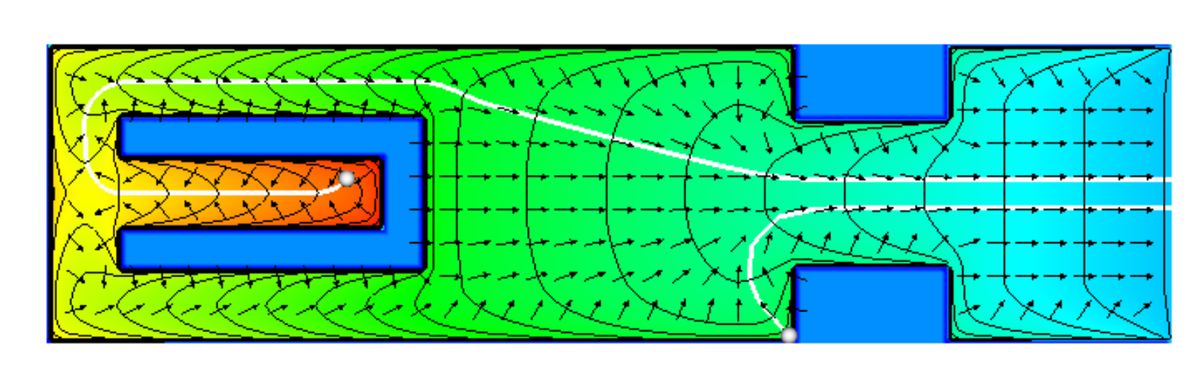
Probably the most used approaches to route choice modeling are shortest path algorithms. They can be based on route minimization of distances in directed graphs or along floorfields.
The overall evacuation time and a visual distribution of the evacuation process are often used as model evaluation criteria. Four strategies can be proposed to reproduce different route choice algorithms:

- Local Shortest Path (LSP): Here pedestrians choose the nearest door in the room.
- Global Shortest Path (GSP): In this variation pedestrian minimize the global distance to the exit from the building, and hence choose locally the exits leading to that minimum.
- Local Shortest combined with the Quickest path (LSQ): Here other factors apart from distance calculations are considered to weight the decision of pedestrians, for instance jam in front of doors, or obstructed visibility due for example to smoke or other factors.
- Global Shortest combined with the Quickest (GSQ): In analogy to LSQ, the GSQ considers the same factors, however the global exit is chosen as default strategy.
Cognitive Maps
While most routing mechanisms in pedestrian dynamics simulations are mainly based on shortest path calculation, or quickest path approximation, individual knowledge or behavior of pedestrians is not taken into consideration. However, it is for example unrealistic to assume that pedestrians in a shopping mall take the shortest path only. In contrast, one should assume that most pedestrians do not even know more than one emergency exit.
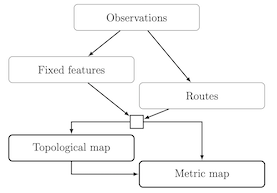
To realize more realistic simulations, individual factors must be considered when implementing wayfinding algorithms. Individual knowledge is the basis to achieve more accentuate the individuality of pedestrians. Based on the idea of the cognitive map, a new algorithm is developed relying on a versatile data structure associated with different kinds of knowledge.
The advantage of this structure is the possibility to distinguish between "first-order" and "second-order" knowledge. In Analogy to cellular automata models, first-order knowledge can be compared to the static floor field and contains information about the geometry, like the position of doors and the nature of the room etc. While second-order knowledge has a dynamic nature (as with dynamic floor field) and contains information about properties related to the first-order knowledge. For example the density in front of doors, influences the weights of the navigation graph in a certain way that pedestrian tend to avoid crowded doors and prefer doors that are less used even if they are further away. Another example of the second-order model is an eventual spread of smoke in a room. Pedestrian react to the intensity of smoke in different way.
